محققان یک ربات نرم توسعه دادهاند که قادر است مانند یک کرم بخزد، از کابلها بالا برود و به سرعت تغییر شکل دهد تا جهتها را تغییر دهد—همه اینها با یک ورودی هوا تغذیه میشوند.
رباتهای نرم انعطافپذیر هستند، اما معمولاً برای حرکت دقیق به سیستمهای پیچیده نیاز دارند. برای کمک به این موضوع، طراحی جدید از یک فراماده ماژولار بادی ضربهای (SIMM) استفاده میکند تا به آرامی تغییر شکل دهد و به سرعت با یک منبع هوا تغییر شکل دهد، و کنترل حرکت را بدون ورودیهای متعدد بهبود میبخشد.
به گفته تیم دانشگاه ملی سئول، نوآوری آنها رویکرد جدیدی را به رباتیک نرم معرفی میکند و امکان انطباقپذیری و تحرک بیشتر در محیطهای مختلف را فراهم میکند.
این تیم در خلاصه مطالعه گفت: "این تحقیق قابلیتهای تغییر شکل را از یک منبع ورودی واحد پیشرفت میدهد و امکانات جدیدی را برای کاربردهایی از جمله جراحی کم تهاجمی و جستجو و نجات باز میکند."
تغییر شکل تطبیقی
محرکهای نرم به دلیل توانایی خود در تعامل انعطافپذیر با محیطهای پیچیده، توجه را به خود جلب کردهاند و وظایفی را فراتر از تواناییهای رباتهای صلب ممکن میسازند.
اگرچه تغییر شکل شدید، دستکاری اشیاء و جابجایی آنها در محیطهای دشوار را ممکن میسازد، اما دستیابی به کنترل دقیق هنوز دشوار است. طرحهای مرسوم با تکیه بر محرکهای متعدد و اجزای سفت و سخت، سازگاری را محدود میکنند و پیچیدگی، وزن و هزینه را افزایش میدهند.
با امکان تغییر شکل قابل برنامهریزی از طریق الگوهای تاشو و برش، ساختارهای الهام گرفته از اوریگامی و کیریگامی پاسخی ارائه میدهند. با این حال، سازگاری آنها محدود است، زیرا بسیاری هنوز برای تحریک به موتورهای الکتریکی غیرقابل انعطاف متکی هستند.
به منظور تسهیل تغییر شکل سریع و چند پایداری، پیشرفتهای اخیر در محرکهای پنوماتیکی از ناپایداریهای کمانش و ضربهای استفاده کردهاند. با حفظ ساختارهای مخدوش بدون ورودی انرژی ثابت، این طرحها مصرف انرژی را کاهش میدهند.
سیستمهای پنوماتیکی نرم و فرامادههای اوریگامی ماژولار راهی عملی برای دستیابی به قابلیتهای چند شکلی بدون نیاز به عناصر کنترل صلب ارائه میدهند و سازگاری رباتیک نرم را برای کاربردهای پیچیده افزایش میدهند.
حرکت الهام گرفته از اوریگامی
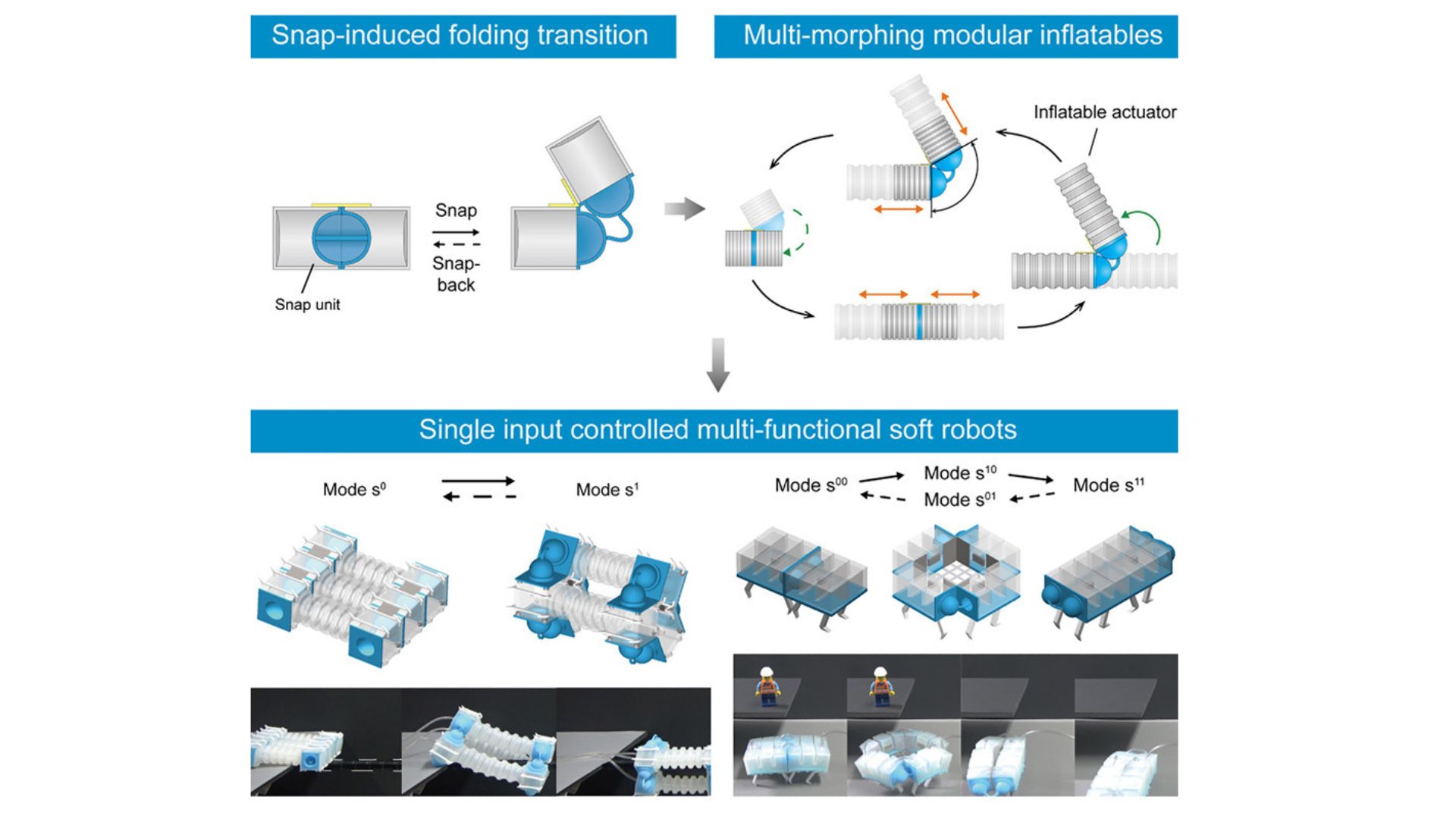
SIMM توسط محققان با استفاده از مفاهیم طراحی از اوریگامی و کیریگامی ایجاد شده است. این روش از ساختارهای سهبعدی با قدرت هوا برای دستیابی به حرکات برگشتپذیر متعدد با یک ورودی فشار استفاده میکند، بر خلاف اوریگامی سنتی که به تا کردن ورقههای نازک متکی است.
وزن، حجم و پیچیدگی کاهش مییابد در حالی که عملکرد با حذف نیاز سیستم به قطعات غیرقابل انعطاف اضافی مانند شیرها و اتصالات مکانیکی افزایش مییابد. این ساختار ممکن است به لطف استفاده از پوستههای دوپایدار که به عنوان لولاهای ضربهای عمل میکنند، به اشکال مختلف تا و باز شود.
محققان نحوه تعیین زوایای تاشو و فشار هوای مورد نیاز برای حرکت توسط این پوستهها را تجزیه و تحلیل کردند و یافتههای خود را از طریق آزمایشها و شبیهسازیها تأیید کردند. با ترکیب ماژولهای ضربهای مختلف، آنها طرحهای سازگاری ایجاد کردند که قادر به عملکردهای مختلف هستند، از جمله حرکت در سطوح مختلف و گرفتن اشیاء به روشهای غیرمتعارف. این نوآوری رباتیک نرم را ساده میکند در حالی که کاربردهای بالقوه آن را گسترش میدهد.
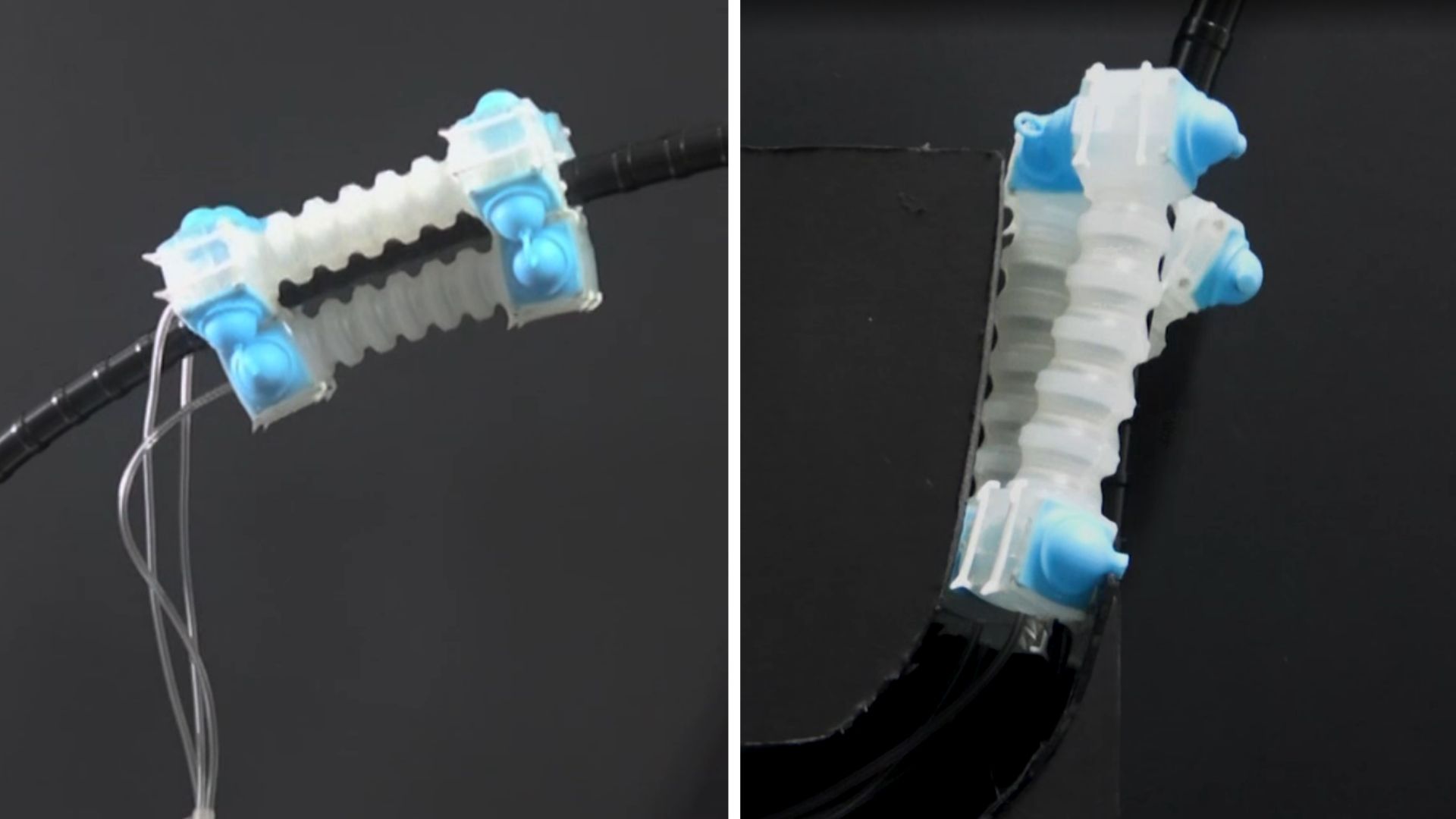
محققان دو طرح رباتیک ساختند تا قابلیتهای سیستم را به نمایش بگذارند. یک ربات خزنده و بالارونده مانند یک کرم خاکی حرکت میکند، منبسط و منقبض میشود تا بخزد و در عین حال کابلها را برای محیطهای چالشبرانگیز میگیرد و از آنها بالا میرود.
یک ربات خود پیکربندی شونده خم میشود تا به جلو حرکت کند، سپس به طور ناگهانی به شکل بزرگتری تبدیل میشود تا جهت را تغییر دهد و در زمینهای پیچیده حرکت کند. این توانایی برای تغییر حالتهای حرکتی در صورت تقاضا، اولین بار در رباتیک نرم است و سازگاری و کنترل بیسابقهای را نشان میدهد.
این تیم در بیانیهای گفت: "این فناوری با توانایی خزیدن، بالا رفتن و تبدیل شدن به اشکال جدید، میتواند منجر به رباتهای نجات شود که در میان آوارها حرکت میکنند، رباتهای پزشکی که در داخل بدن انسان حرکت میکنند و ساختارهای قابل استقراری که در صورت تقاضا تغییر شکل میدهند."
جزئیات تحقیق تیم در مجله Cell Reports Physical Science منتشر شده است.
Jijo Malayil Jijo یک روزنامهنگار خودرو و تجارت مستقر در هند است. او با مدرک لیسانس در تاریخ (افتخارات) از کالج سنت استفان، دانشگاه دهلی، و دیپلم PG در روزنامهنگاری از موسسه رسانههای جمعی هند، دهلی، برای خبرگزاریها، روزنامههای ملی و مجلات خودرو کار کرده است. او در اوقات فراغت خود دوست دارد به آفرود برود، در گفتمان سیاسی شرکت کند، مسافرت کند و زبان تدریس کند.